Introducción
La regulación de la tensión en transformadores con cambiadores de tomas bajo carga es un problema clásico en el suministro y la distribución de energía. Hoy en día, estas tareas se realizan electrónicamente con una alta calidad de control. Se utilizan reguladores digitales, como el sistema regulador de tensión REGSys® de libre programación.
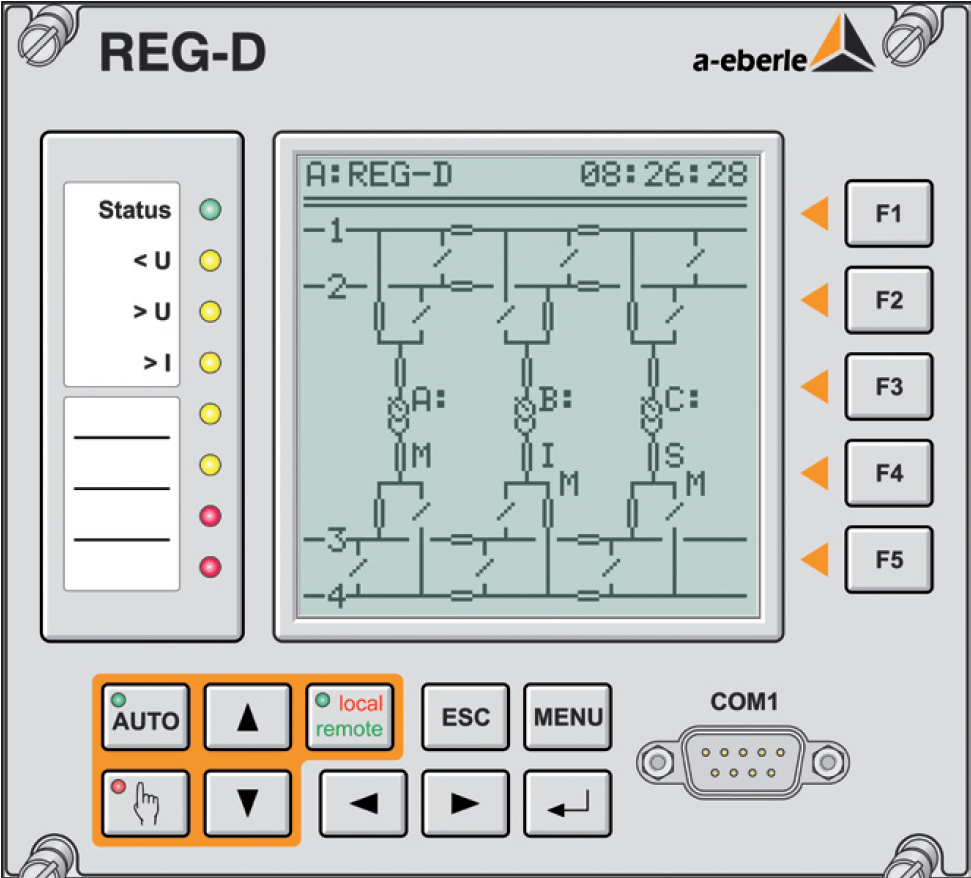
La pieza central del sistema regulador de tensión REGSys® (figura 1) es el regulador de tensión REG-D®, que, además de la función de regulación propiamente dicha, realiza funciones de medición, registro y estadística. El regulador se puede parametrizar a través del teclado o de un PC mediante el software WinREG basado en menús. Las interfaces de comunicación son especialmente importantes para el control paralelo. Todos los datos relevantes pueden intercambiarse a través del bus de controlador doble E-LAN (interfaz RS 485), que permite el tráfico de datos entre hasta 255 controladores. Esto elimina la necesidad de costosos accesorios de medición o unidades de control paralelo.

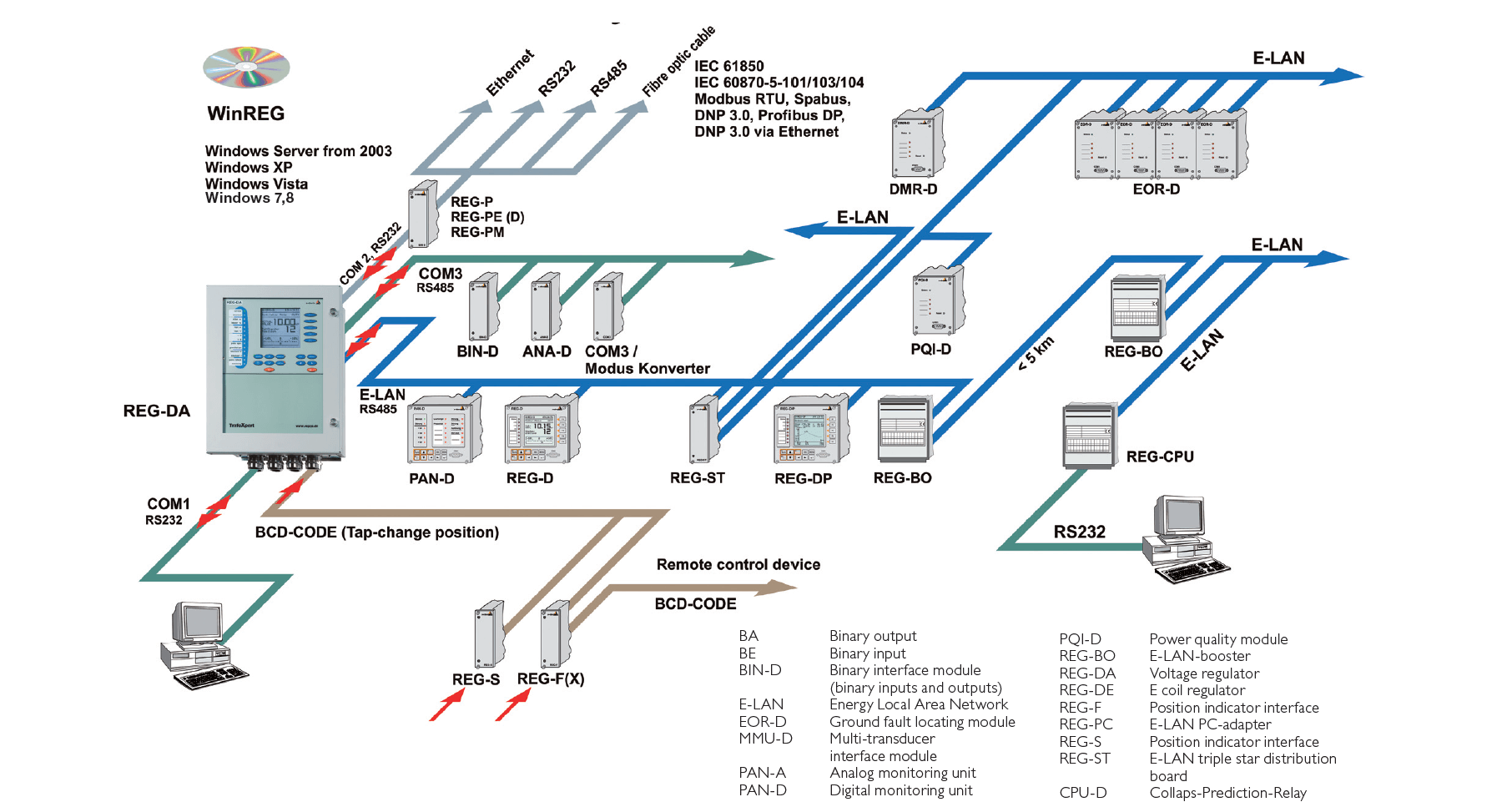
Las interfaces serie COM 1, COM 2 (RS232) y COM 3 (RS485) sirven para conectar un PC, un módem, módulos de interfaz adicionales y tecnología de control de nivel superior. Se dispone de entradas y salidas analógicas y binarias para una amplia gama de funciones de medición y control relacionadas con el transformador. De este modo, por ejemplo, pueden realizarse la realimentación de tomas o la conmutación de consignas. En la figura 2 se muestran las opciones de ampliación del sistema para incluir el control de bobinas Petersen y la localización de fallos a tierra.
Regulación en paralelo de transformadores de tomas con REGSys®
El control de un solo transformador es fácil de entender, pero con el funcionamiento en paralelo las condiciones se vuelven confusas. Hay muchas razones a favor del funcionamiento en paralelo de los transformadores: La potencia necesaria puede distribuirse entre varios transformadores y, en caso de avería, hay reservas para suministrar la potencia eléctrica necesaria. Si hay que alimentar a varios alimentadores, los transformadores pueden conectarse en paralelo a distintas barras colectoras en función de la potencia necesaria para cubrir los picos de potencia con gran flexibilidad.
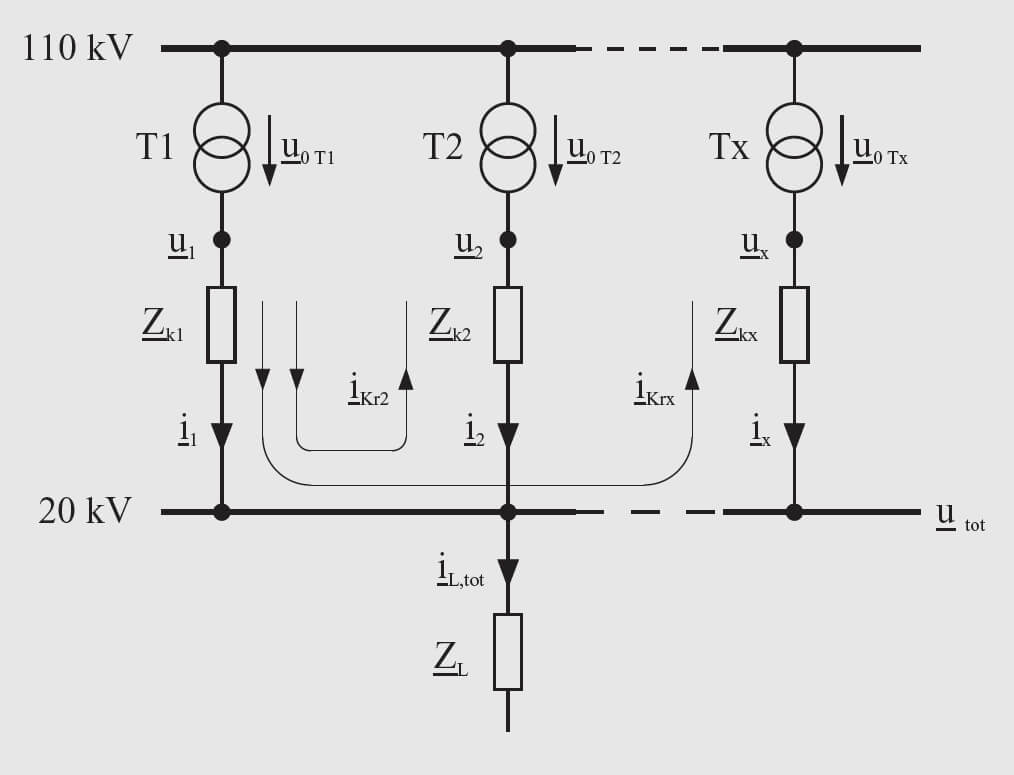
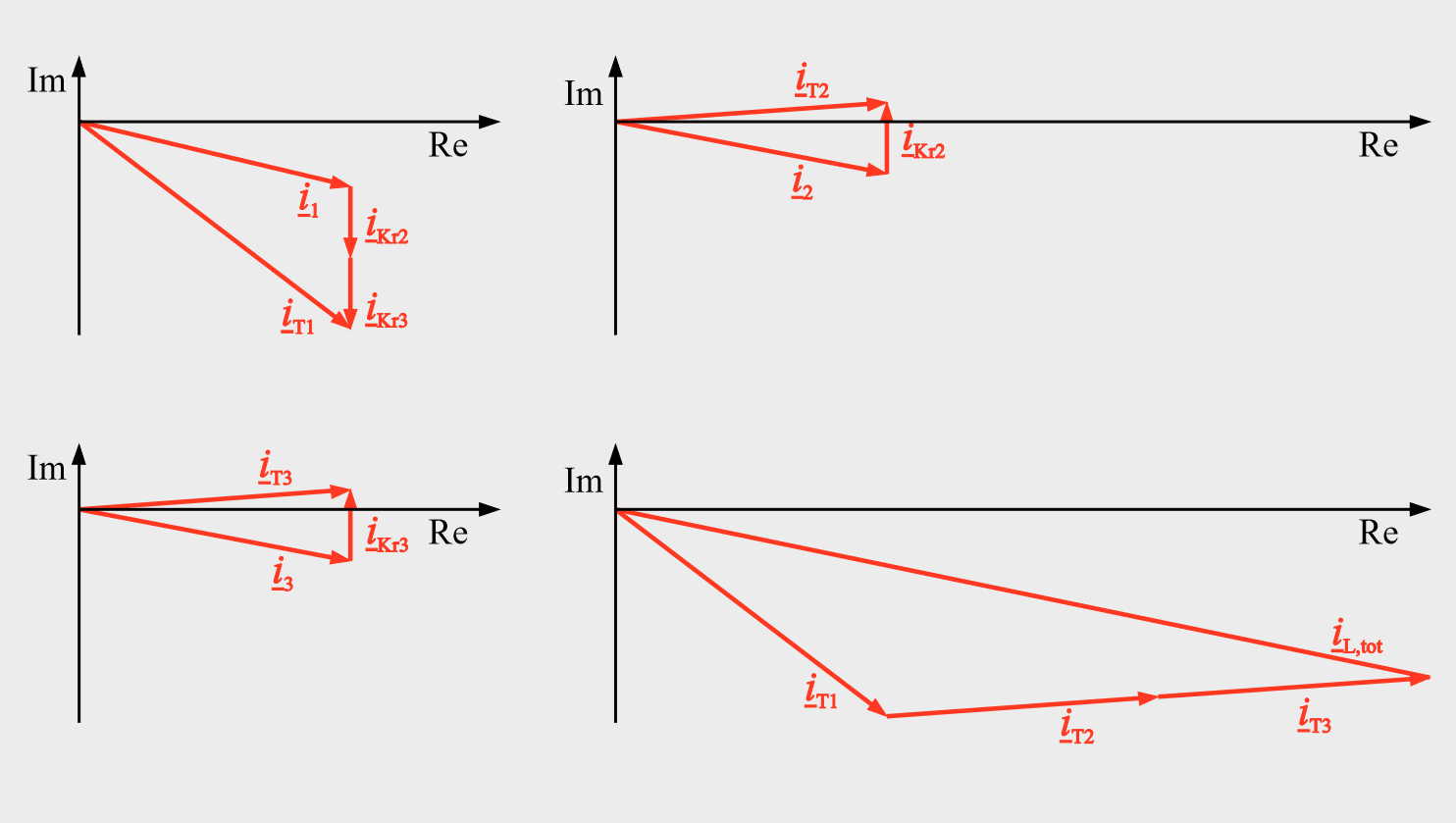
La figura 3 muestra la conexión en paralelo de n transformadores como un diagrama de circuito equivalente. Esto muestra por qué son necesarias precauciones especiales en el funcionamiento en paralelo. Si, por ejemplo, la tensión de excitación u1 es superior a la de u2 a ux, fluyen las corrientes circulantes iKr2 a iKrx. Las corrientes circulantes dependen de las impedancias de cortocircuito Zk1 a Zkx y de las diferencias entre las tensiones en vacío u1 – u2 a u1 – ux. Como las impedancias de los transformadores suelen ser muy pequeñas, pueden fluir corrientes circulantes considerables con transformadores correspondientemente desintonizados, que pueden sobrecargar o al menos sobrecargar desfavorablemente los transformadores en el caso límite. Las siguientes ecuaciones ilustran las relaciones:
iT1 = i1 + iKr2 + … + iKrx (1) iT2 = i2 – iKr2 (2) iTx = ix – iKrx (3)
El ejemplo muestra que el transformador T1 está cargado adicionalmente con todas las corrientes circulantes, mientras que todos los demás transformadores están aliviados por sus respectivas corrientes circulantes. Como las impedancias de los transformadores son altamente inductivas y el componente activo es despreciable, las corrientes circulantes también se denominan corrientes reactivas circulantes.
Un factor adicional que complica la situación es que la regulación de la tensión pierde sensibilidad, ya que un cambio en las tensiones individuales de circuito abierto u1 a ux sólo se incluye parcialmente en la tensión total en las barras colectoras. Suponiendo que las impedancias Zk1 a Zkx son iguales y que uno de los transformadores se desintoniza en Δux para regular la tensión, se obtiene lo siguiente:
u’tot = utot + Δ ux / n (4)
La ecuación (4) muestra que, por ejemplo, con tres transformadores (n=3) conectados en paralelo con la misma impedancia, sólo un tercio del cambio de tensión en un transformador tiene efecto en la barra colectora. Esto dificulta considerablemente la regulación de la tensión. Si las tensiones de los transformadores con una impedancia demasiado alta se igualan con las de los transformadores con una impedancia demasiado baja, la tensión se regula, pero fluyen corrientes circulantes. Para hacer frente a estas situaciones, deben utilizarse variables de medida adicionales para la regulación en paralelo.
Método de regulación de la tensión
Programas REG-D® para funcionamiento en paralelo y sus aplicaciones
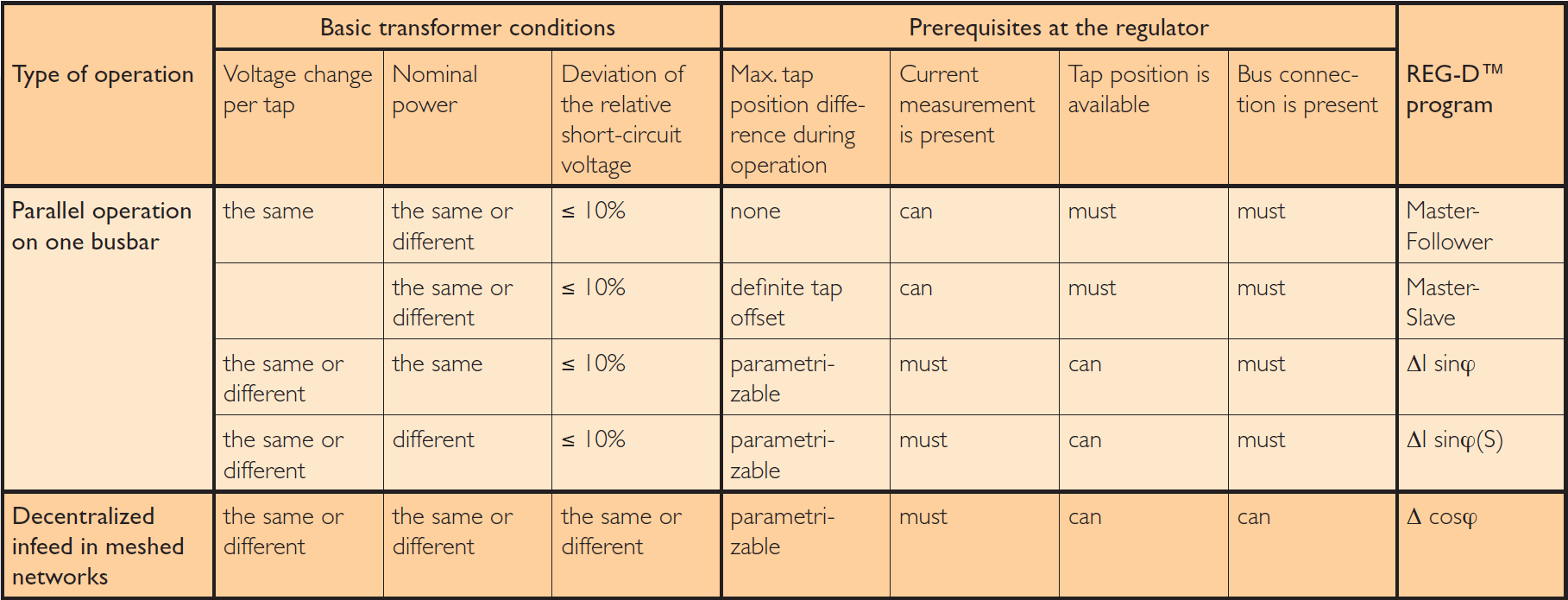
Se utilizan dos métodos de regulación de tensión fundamentalmente diferentes: métodos que solo regulan la tensión, como maestro-esclavo y maestro-seguidor, y los que también tienen en cuenta la corriente reactiva circulante, como los métodos ΔIsinϕ, ΔIsinϕ(S) y Δcosϕ. En la figura 8 se comparan las aplicaciones y requisitos de los métodos de control paralelo implementados en REG-D®. A continuación se muestra qué método es el adecuado para cada tarea.
Método maestro-esclavo y maestro-seguidor
Estos métodos controlan las mismas posiciones de toma de los transformadores. Un controlador toma la iniciativa y los demás siguen sus órdenes de control (control maestro-esclavo). En el método maestro-seguidor, el esclavo está equipado con inteligencia adicional. Puede leer activamente el nivel del maestro a través de E-LAN y ajustarse independientemente al nivel del maestro. Cualquier diferencia de nivel deseada entre el maestro y los esclavos al inicio del control paralelo se mantiene con el método maestro-esclavo, mientras que se iguala con el método maestro-seguidor.
Ambos métodos son especialmente adecuados para transformadores del mismo diseño. Los transformadores con potencias diferentes también pueden funcionar de este modo, pero las mismas posiciones de toma deben dar lugar a las mismas relaciones de transformación (= las mismas tensiones en vacío). Para obtener buenos resultados de control, las tensiones de cortocircuito relativas de los transformadores no deben diferir demasiado (máx. 10%).
Método de la corriente reactiva circular
Con el método de corriente reactiva circulante, la corriente reactiva circulante se determina midiendo las corrientes en la entrada del transformador y se minimiza escalonando selectivamente los transformadores.
Proceso ΔIsinϕ
Para obtener la corriente reactiva circulante, no basta con medir la corriente reactiva en el transformador, ya que también podría deberse a una carga inductiva (véase ix en la figura 3). Con dos transformadores funcionando en paralelo, la corriente reactiva circulante es la mitad de la diferencia entre las dos corrientes reactivas medidas. La parte causada por la carga se elimina matemáticamente. Si hay varios transformadores, se calcula la suma de todas las corrientes reactivas y se divide por el número de transformadores. Así se obtiene la corriente reactiva que tendría que suministrar cada transformador para cubrir las necesidades de potencia reactiva de la carga. Según la figura 3, se aplica lo siguientet:
iL,tot = iT1 + iT2 + … + iTx (5)
Ecuaciones (1) a (3) insertadas en la ecuación (5):
iL,tot = i1+ iKr2 + … + iKrx + i2 - iKr2 + ix - iKrx (6)
Como puede verse en la ecuación (6), todas las corrientes circulares se anulan. El resultado es
iL,tot = i1 + i2 … + ix (7)
Las relaciones de las ecuaciones (5), (6) y (7) pueden transferirse a los componentes reactivos IQx. La suma de las corrientes reactivas en el transformador da como resultado la suma de las corrientes reactivas de carga (véase la figura 4).
Para determinar la corriente reactiva objetivo por transformador, hay que dividir esta corriente reactiva por el número n de transformadores. Cada transformador tendría que suministrar la corriente reactiva objetivo determinada de este modo para cubrir las necesidades de potencia reactiva de las cargas. La corriente reactiva circulante iKrQx de un transformador es, por tanto, la diferencia entre la corriente reactiva medida y la corriente reactiva objetivo:
iKrQx = iQx - (iQ,tot · 1/n) (8) iKrQx:Corriente reactiva circular del transformador nº x iQx: Componente de corriente reactiva de un transformador Nº x iQ,tot: Componente reactivo de la corriente total en todos los transformadores
Proceso ΔIsinϕ
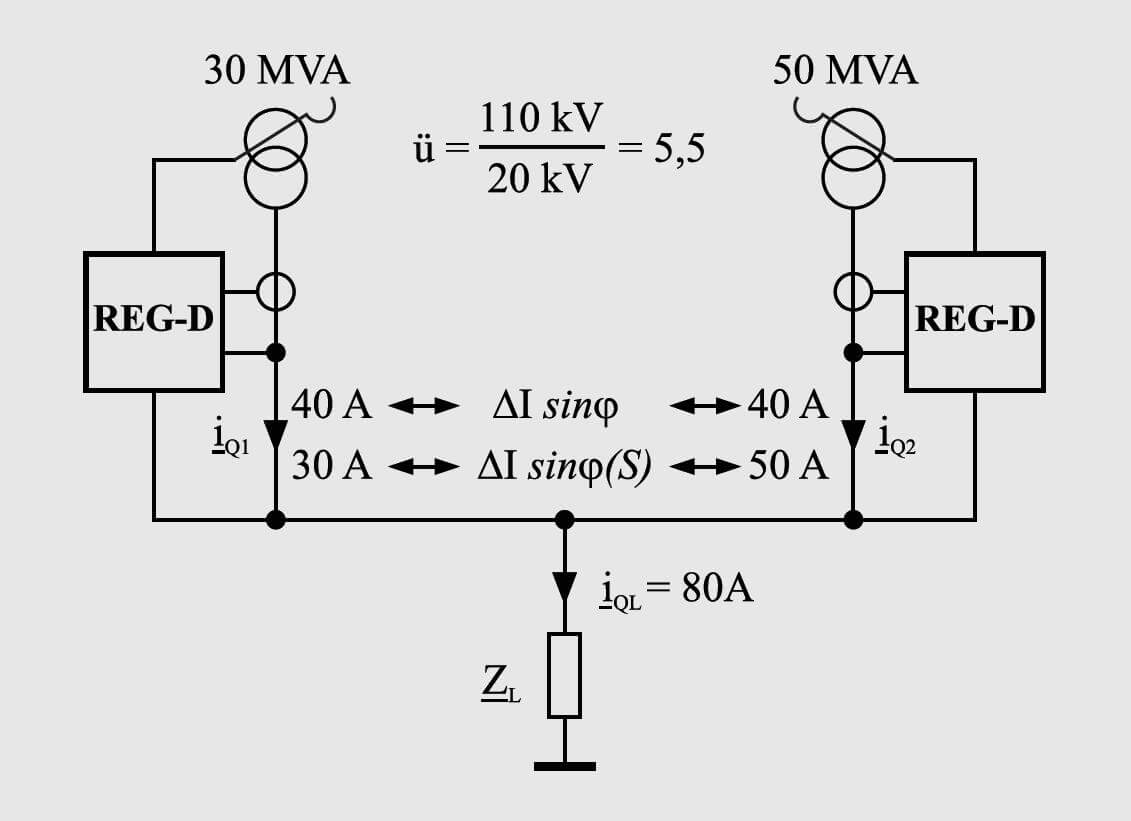
El método ΔIsinϕ(S) es una ampliación del método ΔIsinϕ. Al calcular la corriente reactiva objetivo, se analiza también la potencia nominal de los transformadores. A partir de esta información adicional, es posible distribuir la corriente reactiva entre los transformadores en función de la potencia nominal (véase la figura 5):
iKrQx = iQx - (iQ,tot · Sx/Stot) (9) con Sx: Potencia nominal del transformador nº x Xtot: Potencia nominal total de todos los transformadores
Procedimiento Δcosϕ
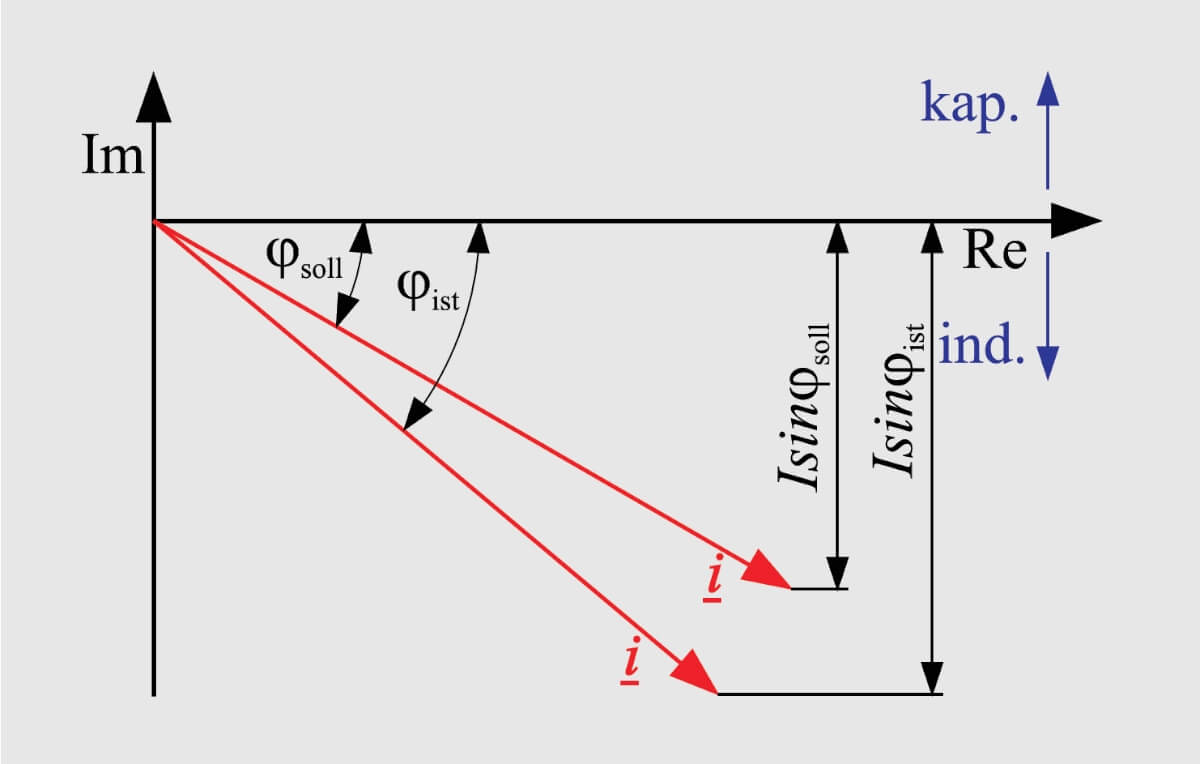
El método Δcosϕ ocupa una posición especial entre los programas de control paralelo. Si varios transformadores alimentan una red ampliamente mallada, los controladores no pueden comunicarse entre sí a través de E-LAN. Esto elimina la necesidad de consulta mutua de las corrientes reactivas y la posibilidad de calcular la corriente reactiva circulante. En primer lugar, el cosϕ de red (cosϕ de red) es especificado por el operador como valor de consigna. La corriente reactiva que se produciría si el cosϕ en el transformador fuera igual al cosϕ de la red puede calcularse a partir de la tensión en barras y la corriente del transformador. Si la corriente reactiva real es mayor, el transformador se escalona más bajo; si es menor, se escalona más alto. La corriente reactiva circulante se calcula del siguiente modo (véase la figura 6):
iKrQx = iTxsinϕist - iTxsinϕsoll (10)
Integración en la regulación de tensión
Como ya se ha descrito, la regulación de la tensión no es suficiente cuando se regulan transformadores conectados en paralelo. Para evitar las corrientes reactivas circulantes, el control de la corriente reactiva circulante se superpone al control de la tensión (figura 7). El resultado son las variables manipuladas YU e YP:
YU = (Uist – Usoll) / ∆Uzul (11) YP = IKrQx / IKrQzul (12) con: Uist: Valor real de la tensión efectiva Usoll: Valor de consigna de la tensión efectiva ΔUzul: Desviación admisible de la regulación IKrQzul: Corriente reactiva admisible del circuito
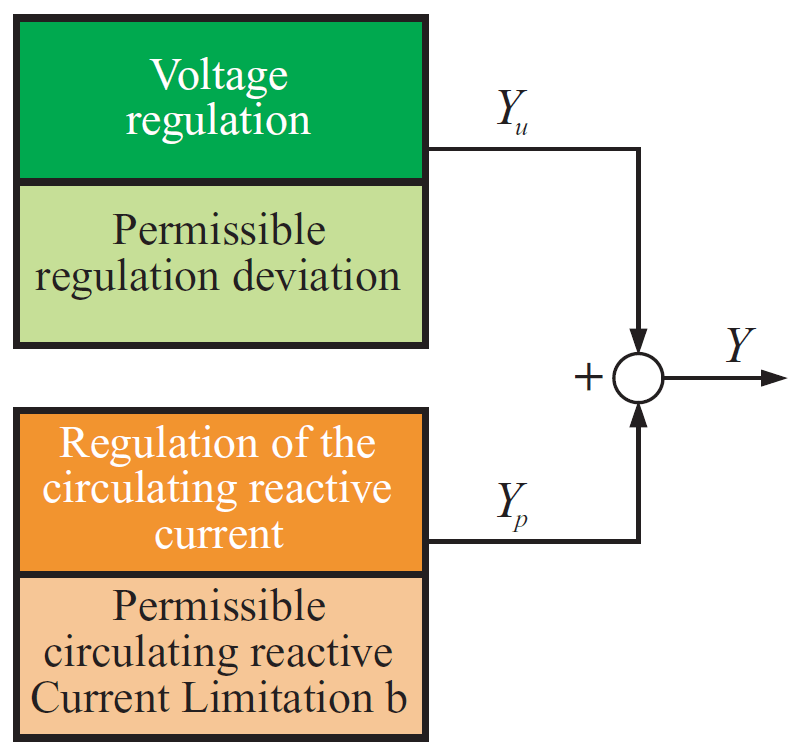
Lo siguiente también se aplica a la variable manipulada resultante Y (véase la figura 7):
Y = YU + YP (13)
Los comandos de posicionamiento para el control se derivan de la ecuación (13) de la siguiente manera: Para Y > + 1,0, se activa una orden de control MENOR; para Y < – 1,0, se activa una orden de control MAYOR. La tensión y la corriente reactiva circulante se controlan independientemente entre sí hasta las desviaciones admisibles. Las órdenes de control que provocan una modificación no admisible de la tensión debido a la minimización de la corriente reactiva circulante se regulan a través de todos los transformadores conectados en paralelo. De este modo, no se produce ninguna desviación de control permanente para la tensión.
El método Δcosϕ también ocupa una posición especial con respecto a la influencia de la regulación de la tensión por la regulación de la corriente reactiva circulante. También hay influencia si el cosϕ de la red difiere del valor de consigna. La desviación de regulación permanente ΔU depende de los dos ángulos de fase ϕset y ϕactual, de la corriente aparente I, de la desviación de regulación admisible set ΔUzul y de la corriente reactiva circulante admisible set IKrQzul:
∆U=∆Uzul · (sinϕsoll– sinϕist )·I / IKrQzul (14)
Sin embargo, esta influencia puede limitarse, como muestra la ecuación 16. Además de la corriente reactiva circulante admisible, la limitación b se especifica como parámetro en la figura 7; indica el tamaño máximo de «YP«.
I YP I < b (15)
Esto limita la desviación de control permanente ΔU a
∆U = b · ∆Uzul (16)
En caso de fuertes oscilaciones de las cargas y las correspondientes variaciones del cosϕ de red, también es posible ajustar el valor nominal del cosϕ mediante un proceso de autoaprendizaje. De este modo se evitan desviaciones de regulación permanentes en la tensión y corrientes reactivas circulantes inadmisiblemente elevadas.
Precauciones de seguridad
En todos los métodos (excepto en el método Δcosϕ), los controladores que participan en la conexión en paralelo intercambian los datos necesarios a través de la E-LAN. Si se interrumpe la conexión E-LAN, hay que asegurarse de que se sigue garantizando un control fiable. Como el método Δcosϕ funciona sin conexión de bus, se utiliza como programa de emergencia. Este programa de emergencia está implementado de serie en el regulador REG-D®. El modo de funcionamiento puede describirse como sigue: Durante el funcionamiento sin perturbaciones con los métodos ΔIsinϕ y ΔIsinϕ(S), se mide constantemente el cosϕ de la red. Tras un fallo de bus, el último cosϕ medido se interpreta como el cosϕ objetivo y se inicia el proceso Δcosϕ.
Una vez subsanado el fallo del bus, el sistema vuelve al programa paralelo activo anteriormente. Si la conexión de bus se interrumpe durante los procedimientos maestro-esclavo y maestro-seguidor, el esclavo vuelve automáticamente al modo de controlador individual. Se envía un mensaje de error para señalar este estado.
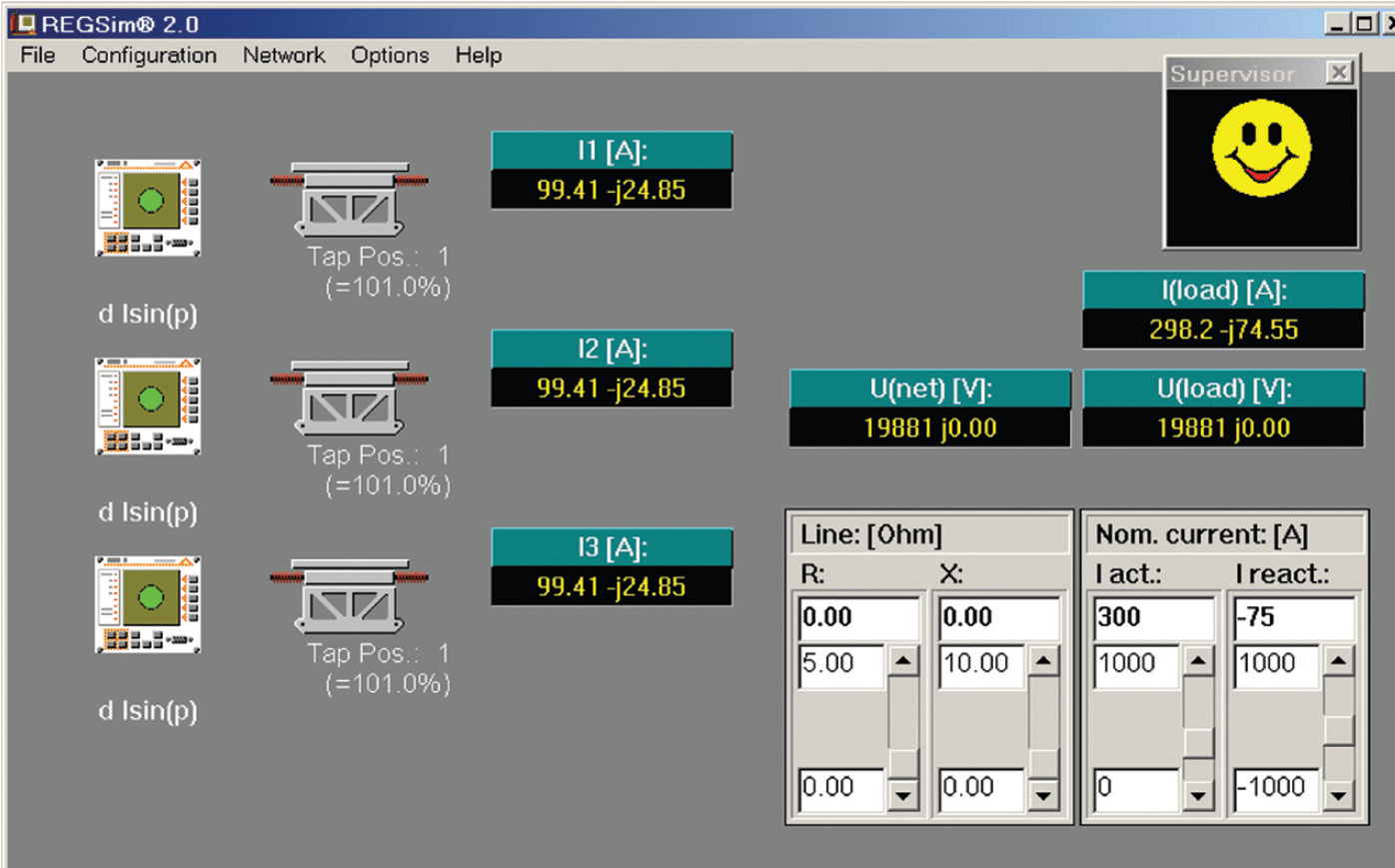
Software de simulación
Qué método de control paralelo es adecuado para qué sistema puede estimarse a partir de consideraciones teóricas (Figura 8). El software REGSim (Figura 9) ofrece la posibilidad de simular el método de control paralelo en cualquier constelación de funcionamiento con transformadores, red y cargas. Para ello se utilizan los algoritmos de control implementados en el regulador. Pueden parametrizarse diversos datos clave (tensión nominal, impedancia del transformador, etc.).
Esto permite simular el sistema de regulación de tensión REGSys® en una situación específica del sistema. Sin intervenir en el sistema, es posible determinar cómo se comporta el sistema de regulación en situaciones extremas (saltos de carga, fallos a tierra). También se puede estimar de antemano la calidad de la regulación (estabilidad de la tensión, número de conmutaciones). Por supuesto, el programa también es adecuado para fines de formación.
Funcionamiento en paralelo automático
El ParaGramer (figura 10) sirve de ayuda para la preparación automática de circuitos en paralelo y para la visualización en línea de los estados de conmutación. El ParaGramer visualiza los transformadores que intervienen en el funcionamiento en paralelo, incluidos los interruptores automáticos, seccionadores y acoplamientos transversales y longitudinales en una pantalla monofásica. Cada controlador debe recibir una imagen completa de la barra colectora a través de una entrada binaria. Basándose en los estados de conmutación, el sistema reconoce automáticamente qué transformadores están alimentando en paralelo con qué otro(s) en una barra colectora. El sistema trata las barras colectoras conectadas mediante acoplamientos transversales como una única barra colectora.
En la figura 10, por ejemplo, los transformadores T1 y T3 alimentan la barra colectora a, mientras que el transformador T2 alimenta la barra colectora b. Con la ayuda del ParaGramer, también es posible realizar asignaciones de barras de alta tensión. El ParaGramer es, por tanto, una herramienta adecuada para realizar una gran variedad de circuitos en paralelo de forma segura y con poco esfuerzo.