Introduction
La régulation de la tension sur les transformateurs avec des changeurs de prises est un sujet classique de l’alimentation et de la distribution d’énergie. Aujourd’hui, ces tâches sont effectuées électroniquement avec une grande qualité de régulation. On utilise des régulateurs numériques, comme par exemple le système de régulation de tension librement programmable REGSys®.
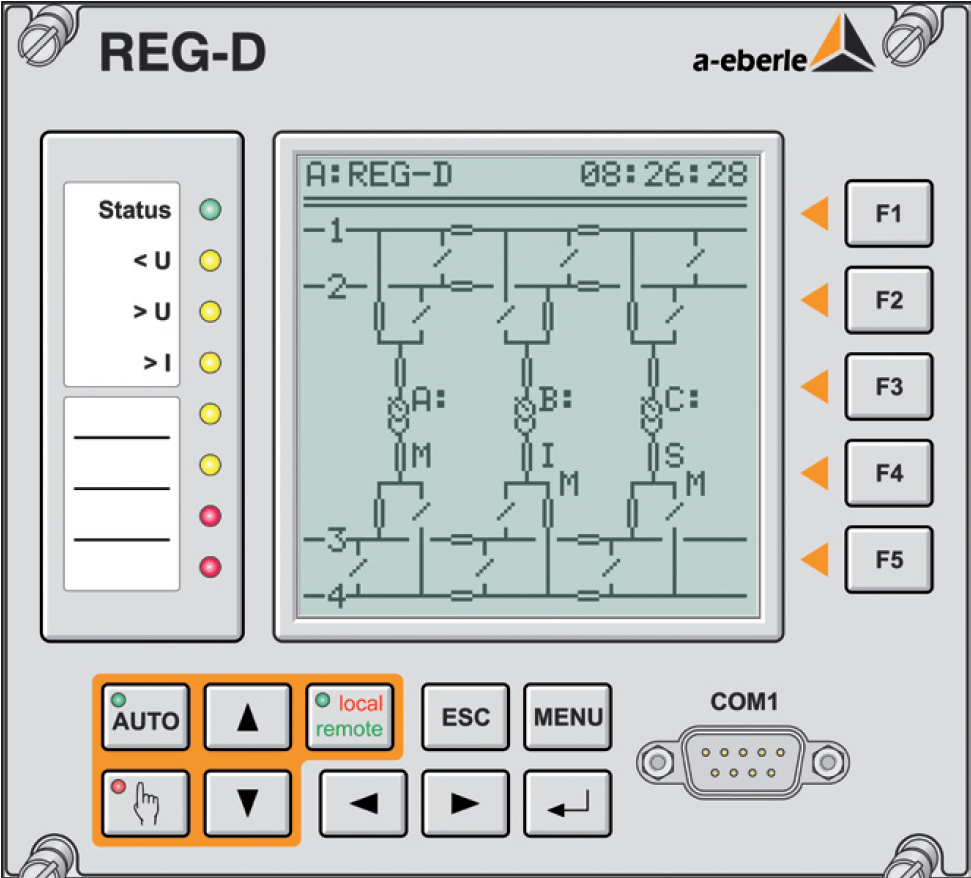
La pièce maîtresse du système de régulateur de tension REGSys® (figure 1) est le régulateur de tension REG-D® qui, outre la fonction de régulation proprement dite, assure également des fonctions de mesure, d’enregistrement et de statistiques. Le paramétrage du régulateur peut être effectué soit par le clavier, soit par PC à l’aide du logiciel WinREG, guidé par des menus. Les interfaces de communication sont particulièrement importantes pour la régulation parallèle. Toutes les données importantes peuvent être échangées via le bus de régulateur E-LAN (interface RS 485), qui permet la transmission de données entre jusqu’à 255 régulateurs. De cette manière, il n’est plus nécessaire de recourir à des accessoires de mesure ou à des appareils de commande parallèles coûteux.

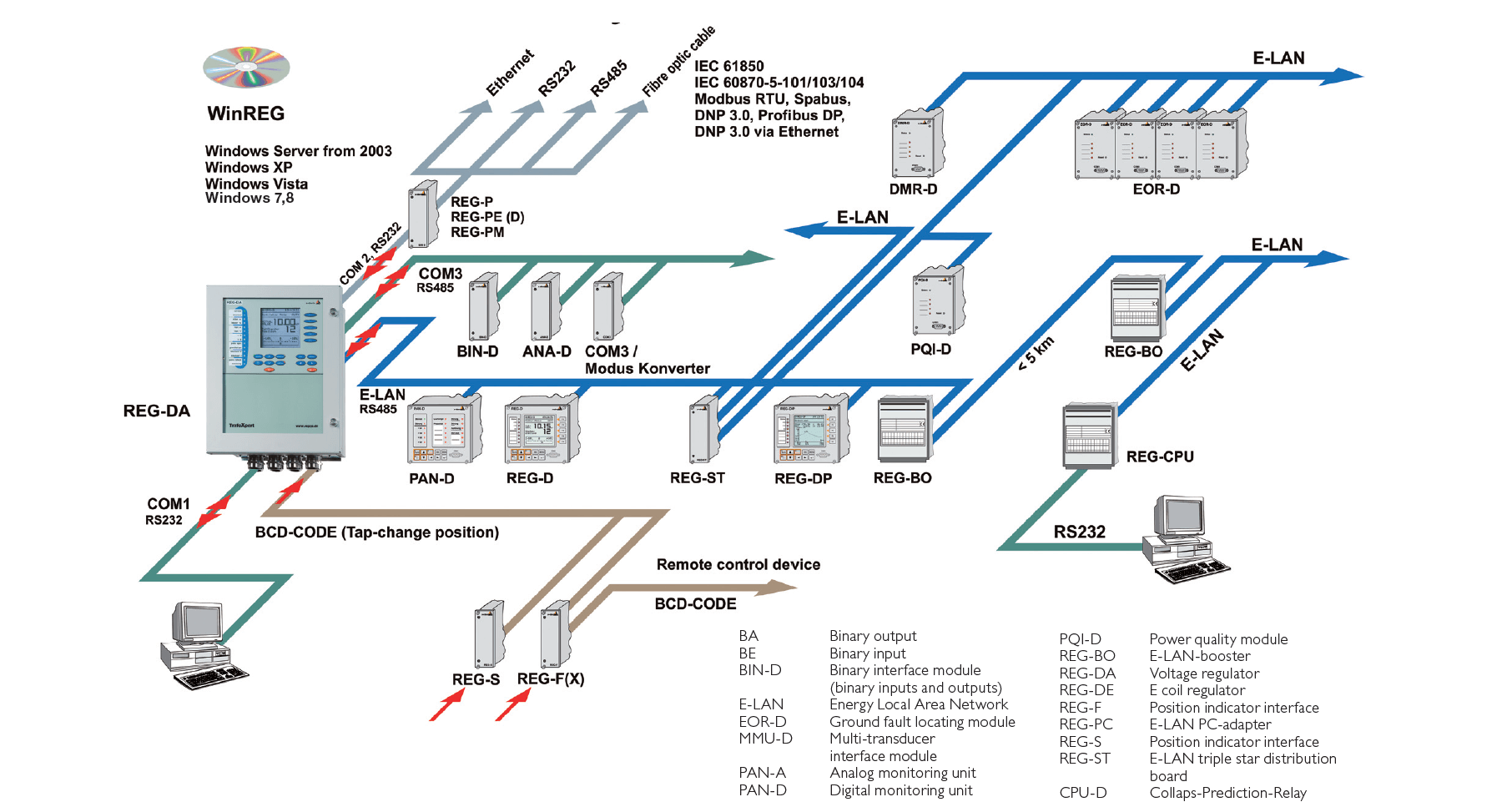
Les interfaces sérielles COM 1, COM 2 (RS232) et COM 3 (RS485) servent au couplage d’un PC, d’un modem, de modules d’interface supplémentaires et d’un système de contrôle-commande de niveau supérieur. Des entrées et sorties analogiques et binaires sont disponibles pour les fonctions de mesure et de commande les plus diverses autour du transformateur. De cette manière, il est par exemple possible de réaliser la rétroaction des étages ou une commutation de la valeur de consigne. Les possibilités d’extension du système jusqu’à la régulation de la bobine de Petersen et la localisation des défauts de terre sont représentées dans la figure 2.
Régulation parallèle de transformateurs à gradins avec REGSys®
La régulation d’un seul transformateur est facile à maîtriser, mais en cas de fonctionnement en parallèle, les choses deviennent confuses. Il y a de multiples raisons qui parlent en faveur du fonctionnement en parallèle des transformateurs : La puissance nécessaire peut être répartie sur plusieurs transformateurs et, en cas de panne, des réserves sont disponibles pour mettre à disposition la puissance électrique nécessaire. Si plusieurs départs doivent être alimentés, les transformateurs peuvent être branchés en parallèle sur différentes barres omnibus en fonction de la puissance requise, ce qui permet de couvrir les pics de puissance de manière très flexible.
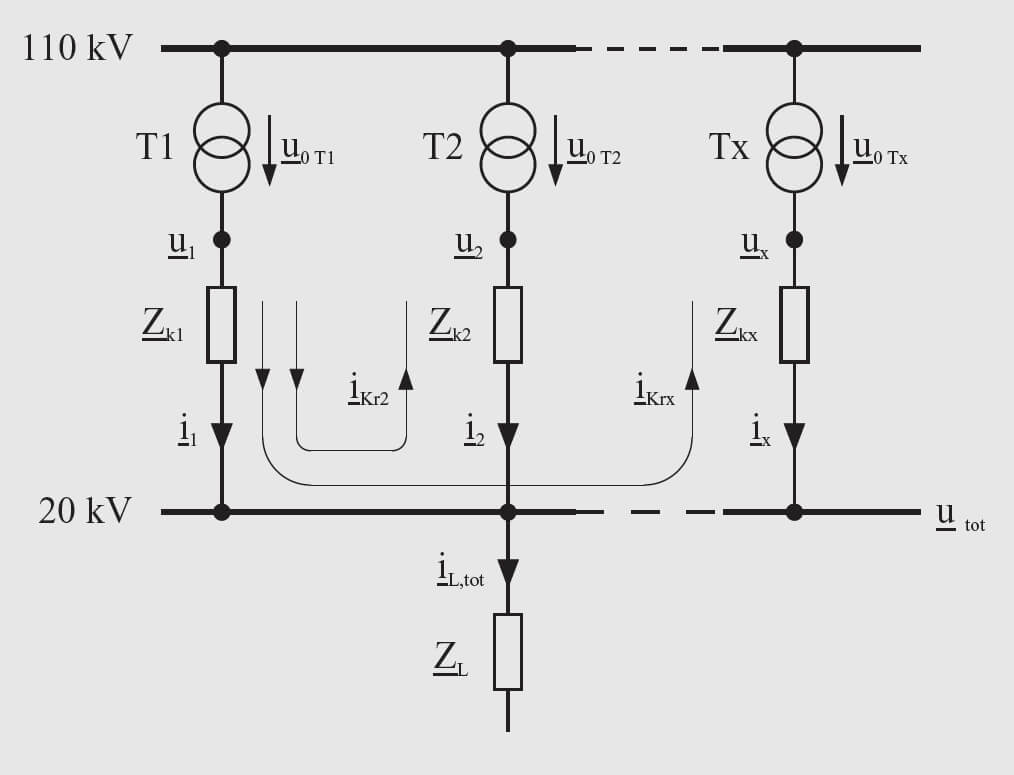
La figure 3 représente le montage en parallèle de n transformateurs sous forme de schéma équivalent. On peut y voir pourquoi des précautions particulières sont nécessaires en fonctionnement parallèle. Par exemple, si la tension de commande u1 est supérieure à u2 à ux, les courants de circuit iKr2 à iKrx circulent. Les courants de circuit dépendent des impédances de court-circuit Zk1 à Zkx et des différences des tensions à vide u1 – u2 à u1 – ux. Comme les impédances des transformateurs sont généralement très faibles, des courants de circuit considérables peuvent circuler avec des transformateurs désaccordés en conséquence, ce qui peut surcharger les transformateurs dans le cas limite ou du moins les charger de manière défavorable. Les équations suivantes illustrent ces relations :
iT1 = i1 + iKr2 + … + iKrx (1) iT2 = i2 – iKr2 (2) iTx = ix – iKrx (3)
L’exemple montre que le transformateur T1 est en outre chargé par tous les courants de circuit, alors que tous les autres transformateurs sont déchargés par leur courant de circuit respectif. Comme les impédances des transformateurs sont fortement inductives et que la part active est négligeable, les courants circulaires sont également appelés courants réactifs circulaires.
La situation est encore compliquée par le fait que la régulation de la tension perd en sensibilité, car une modification des différentes tensions à vide u1 à ux ne se répercute qu’en partie sur la tension totale au niveau du jeu de barres. En supposant que les impédances Zk1 à Zkx sont égales et qu’un des transformateurs est désaccordé de Δux à des fins de régulation de la tension, on obtient :
u’tot = utot + Δ ux / n (4)
L’équation (4) montre que, par exemple, dans le cas de trois transformateurs (n=3) montés en parallèle et présentant la même impédance, la variation de tension sur un transformateur ne se répercute que pour un tiers sur la barre omnibus. Cette situation complique considérablement la régulation de la tension. Si les tensions des transformateurs à gradation trop élevée s’équilibrent même avec celles des transformateurs à gradation trop faible, la tension est certes régulée, mais des courants circulaires circulent. Pour faire face à de telles situations, il faut utiliser des grandeurs de mesure supplémentaires pour la régulation parallèle.
Procédure de régulation de la tension
Programmes REG-D® pour le fonctionnement en parallèle et leurs applications
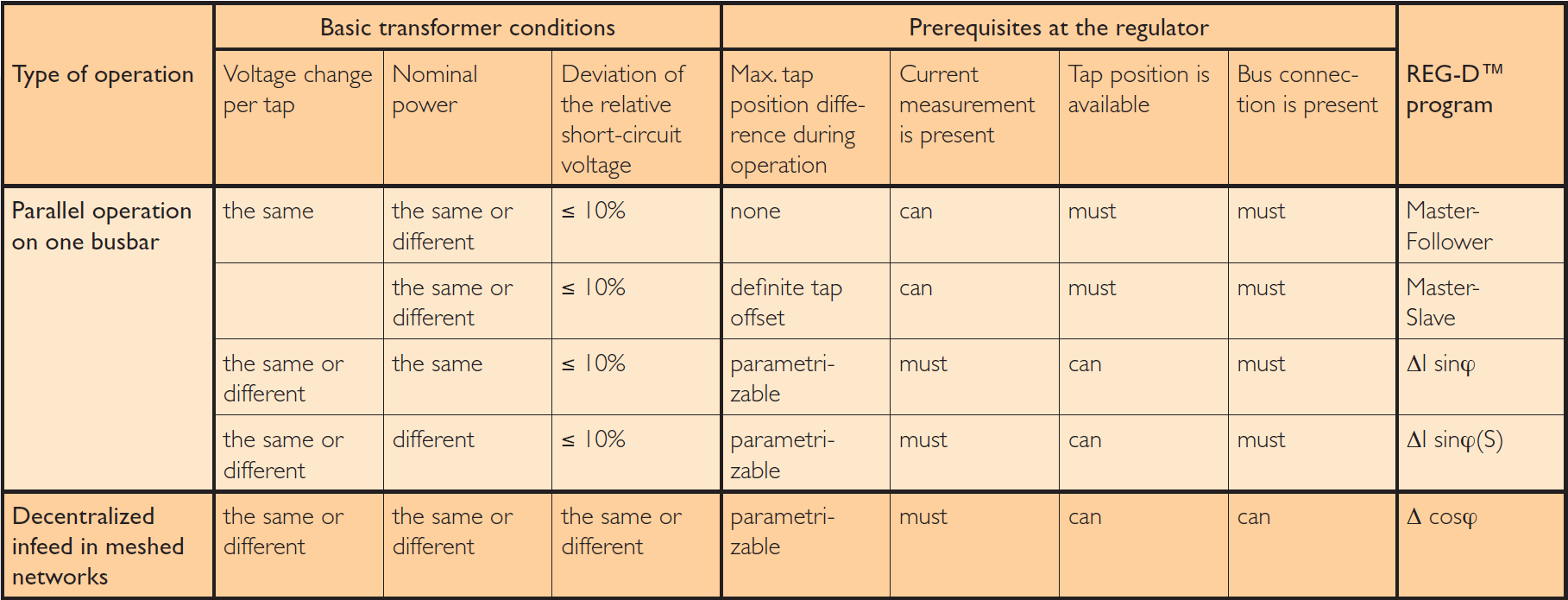
Deux procédés de régulation de tension fondamentalement différents sont utilisés : les procédés qui régulent uniquement la tension, comme le maître-esclave et le maître-suiveur, et ceux qui tiennent également compte du courant réactif de circulation, comme les procédés ΔIsinϕ, ΔIsinϕ(S) et Δcosϕ. Les applications et les conditions des procédés de régulation parallèle implémentés dans le REG-D® sont comparées dans la figure 8. Le procédé le plus adapté à chaque tâche est présenté ci-dessous.
Procédures maître-esclave et maître-suiveur
Ces procédés régulent sur des positions de prise identiques des transformateurs. Un régulateur prend alors la direction des opérations, tandis que les autres régulateurs suivent ses ordres de réglage (régulation maître-esclave). Dans le cas de la méthode maître-suiveur, l’esclave est doté d’une intelligence supplémentaire. Il peut lire activement le niveau du maître via E-LAN et se positionner de manière autonome sur son niveau. Une différence de niveau voulue entre le maître et les esclaves, présente au début de la régulation parallèle, subsiste dans le cas du procédé maître-esclave, alors qu’elle est compensée dans le cas du procédé maître-suiveur.
Les deux méthodes conviennent particulièrement bien aux transformateurs de même type. Des transformateurs de puissance différente peuvent également être exploités de cette manière, mais les mêmes positions de prises doivent alors conduire à des rapports de transmission identiques (= mêmes tensions à vide). Pour obtenir de bons résultats de régulation, les tensions de court-circuit relatives des transformateurs ne doivent pas trop s’écarter les unes des autres (max. 10%).
Méthode du courant réactif circulaire
Dans les procédés de courant réactif de circulation, le courant réactif de circulation est déterminé en mesurant les courants à l’entrée des transformateurs et minimisé par un étagement ciblé des transformateurs.
ΔIsinϕ-Procédure
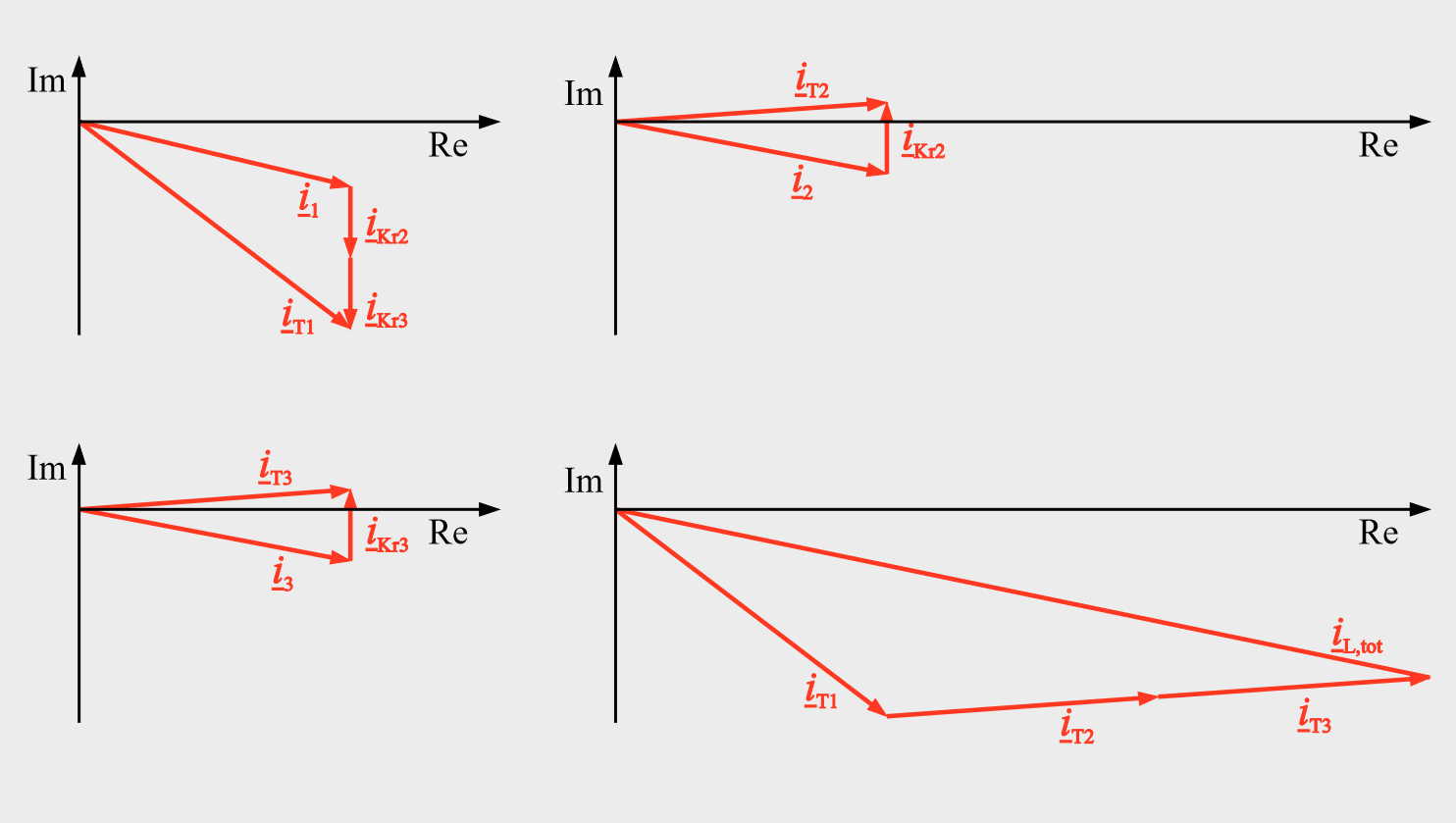
Pour obtenir le courant réactif de circulation, il ne suffit pas de mesurer simplement le courant réactif au niveau du transformateur, car celui-ci pourrait également être dû à un consommateur inductif (voir ix dans la figure 3). Dans le cas de deux transformateurs fonctionnant en parallèle, le courant réactif de circulation est obtenu en divisant par deux la différence entre les deux courants réactifs mesurés. La part causée par le consommateur est alors mathématiquement éliminée. Dans le cas de plusieurs transformateurs, on fait la somme de tous les courants réactifs et on la divise par le nombre de transformateurs. On obtient alors le courant réactif que chaque transformateur devrait fournir pour couvrir les besoins en puissance réactive de la charge. Selon la figure 3, on a :
iL,tot = iT1 + iT2 + … + iTx (5)
Equations (1) à (3) insérées dans l’équation (5) :
iL,tot = i1+ iKr2 + … + iKrx + i2 - iKr2 + ix - iKrx (6)
Comme on peut le voir dans l’équation (6), tous les courants circulaires sont éliminés. Il en résulte que :
iL,tot = i1 + i2 … + ix (7)
Les rapports des équations (5), (6) et (7) peuvent être appliqués aux parts réactives IQx. En additionnant les courants réactifs au niveau du transformateur, on obtient la somme des courants réactifs de charge (voir figure 4).
Pour déterminer le courant réactif de consigne par transformateur, il faut diviser ce courant réactif par le nombre n de transformateurs. Chaque transformateur devrait fournir le courant réactif de consigne ainsi déterminé afin de couvrir les besoins en puissance réactive des consommateurs. Le courant réactif de circulation iKrQx d’un transformateur est donc la différence entre le courant réactif mesuré et le courant réactif de consigne :
iKrQx = iQx - (iQ,tot · 1/n) (8) iKrQx: courant réactif de circulation du transformateur n° x iQx: part de courant réactif d'un transformateur n° x iQ,tot: part de courant réactif du courant total sur tous les transformateurs
ΔIsinϕ-Procédure
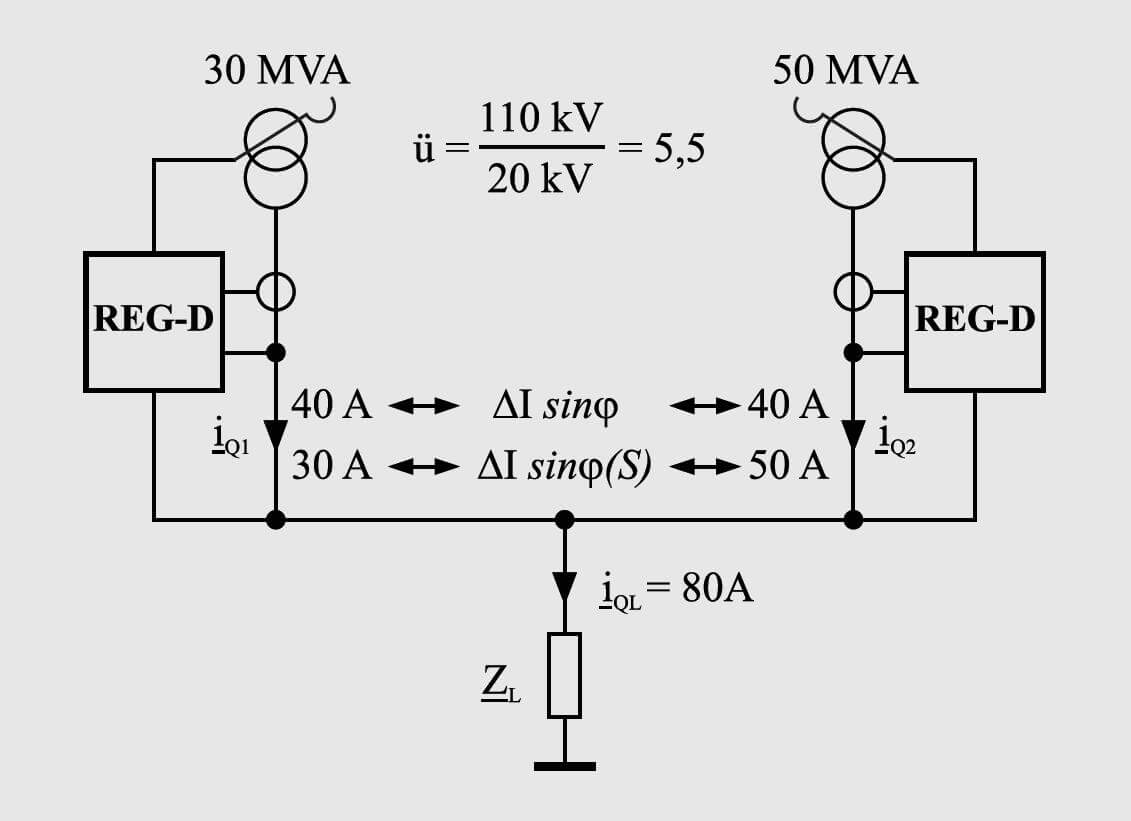
La méthode ΔIsinϕ(S) est une extension de la méthode ΔIsinϕ. Lors du calcul du courant réactif de consigne, les puissances nominales des transformateurs sont également évaluées. Sur la base de cette information supplémentaire, il est possible de répartir le courant réactif entre les transformateurs en fonction des puissances nominales (voir figure 5) :
iKrQx = iQx - (iQ,tot · Sx/Stot) (9) avec : Sx: puissance nominale du transformateur no x Xtot: puissance nominale totale de tous les transformateurs
Procédure Δcosϕ
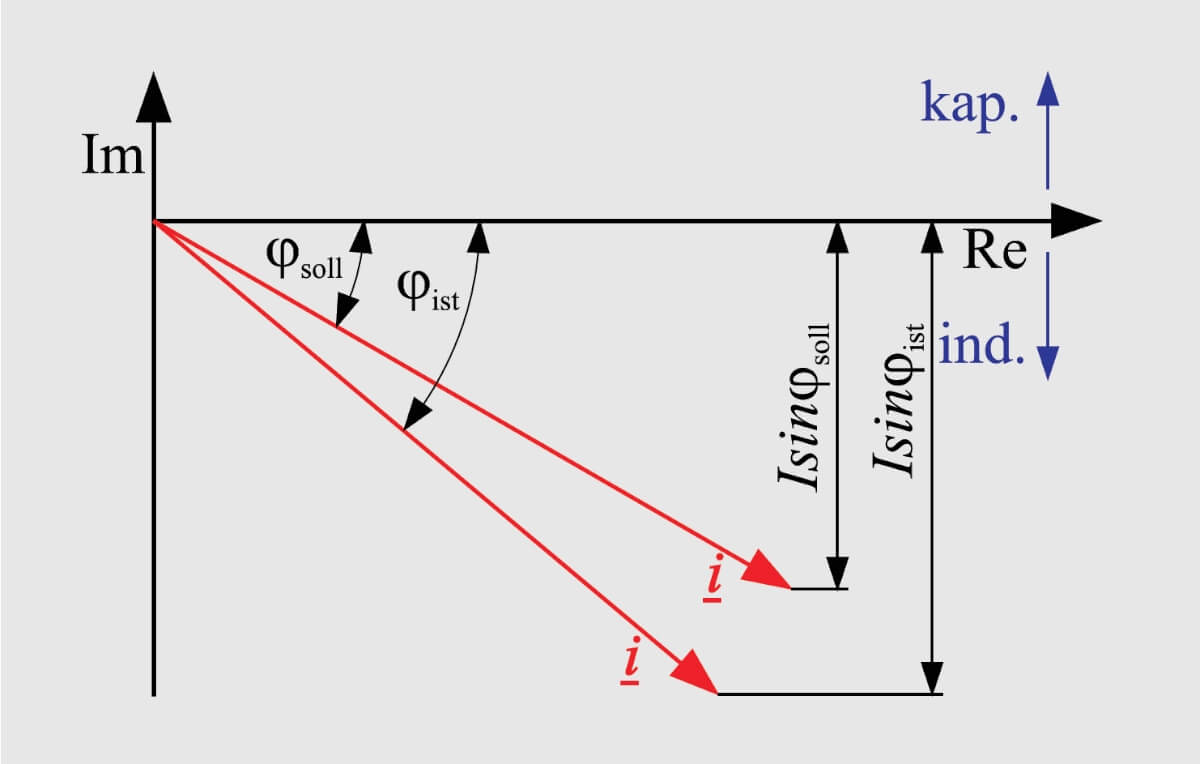
Le procédé Δcosϕ occupe une place particulière parmi les programmes de régulation parallèle. Si plusieurs transformateurs alimentent un réseau largement maillé, les régulateurs ne peuvent pas communiquer entre eux via E-LAN. Il n’est donc plus nécessaire de s’interroger mutuellement sur les courants réactifs et il n’est plus possible de calculer le courant réactif de circuit. Tout d’abord, le cosϕ du réseau est défini par l’exploitant comme valeur de consigne. À partir de la tension du jeu de barres et du courant du transformateur, il est possible de calculer le courant réactif qui se produirait si le cosϕ au transformateur était égal au cosϕ du réseau. Si le courant réactif réel est plus élevé, le transformateur est gradué plus bas, s’il est plus bas, il est gradué plus haut. Le courant réactif de circulation se calcule alors comme suit (voir figure 6) :
iKrQx = iTxsinϕist - iTxsinϕsoll (10)
Intégration dans la régulation de la tension
Comme nous l’avons déjà décrit, la régulation de la tension n’est pas suffisante pour la régulation de transformateurs montés en parallèle. Pour éviter les courants réactifs de circulation, la régulation des courants réactifs de circulation est superposée à la régulation de la tension (figure 7). Les grandeurs de réglage YU et YP sont alors calculées comme suit :
YU = (Uist – Usoll) / ∆Uzul (11) YP = IKrQx / IKrQzul (12) avec : Uist: valeur réelle de la tension efficace Usoll: valeur de consigne de la tension efficace ΔUzul: écart de réglage admissible IKrQzul: courant réactif de circulation admissible
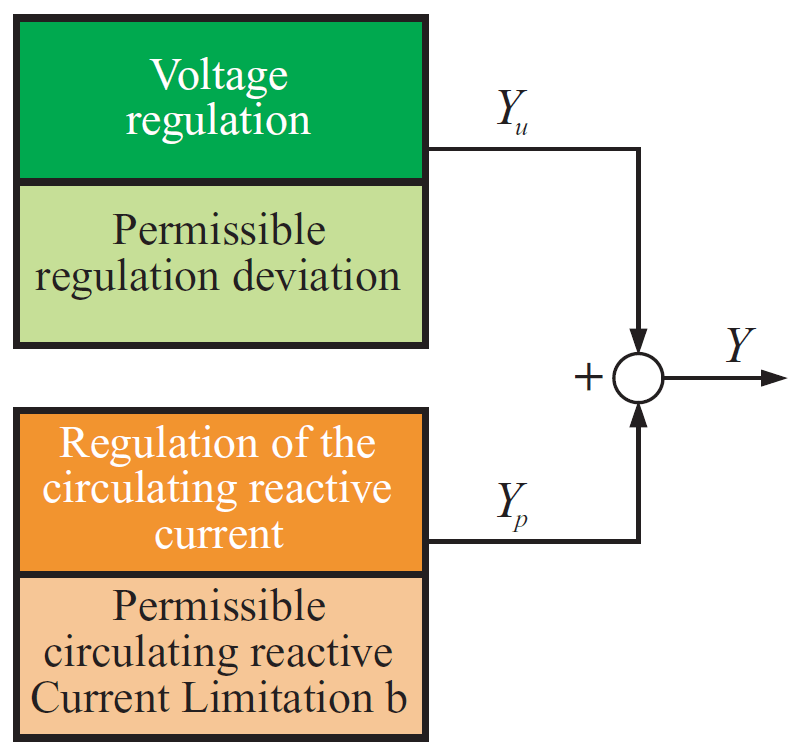
De plus, pour la grandeur de commande résultante Y (voir figure 7) :
Y = YU + YP (13)
Les commandes de réglage pour la régulation sont déduites de l’équation (13) comme suit : Pour Y > + 1,0, un ordre de réglage BAS est déclenché, pour Y < – 1,0, un ordre de réglage HAUT est déclenché. La tension et le courant réactif de circulation sont alors réglés indépendamment l’un de l’autre sur les écarts admissibles. Les commandes de réglage qui, en raison de la minimisation du courant réactif de circulation, entraînent une modification inadmissible de la tension, sont régulées par l’ensemble des transformateurs montés en parallèle. De cette manière, il n’y a pas d’écart de régulation permanent pour la tension.
Le procédé Δcosϕ occupe également une position particulière en ce qui concerne l’influence de la régulation de la tension par la régulation du courant réactif de circulation. Il en résulte une influence même si le cosϕ du réseau diffère de la valeur de consigne réglée. L’écart de réglage permanent ΔU dépend des deux angles de phase ϕconsigne et ϕréel, du courant apparent I, de l’écart de réglage admissible réglé ΔUzul et du courant réactif de circulation admissible réglé IKrQzul :
∆U=∆Uzul · (sinϕsoll– sinϕist )·I / IKrQzul (14)
Cette influence peut toutefois être limitée, comme le montre l’équation 16. Dans la figure 7, outre le courant réactif de circulation admissible, la limitation b est indiquée comme paramètre ; elle indique la valeur maximale que « YP » peut atteindre.
I YP I < b (15)
Ainsi, l’écart de réglage permanent ΔU est limité à
∆U = b · ∆Uzul (16)
En cas de fortes variations de charges et de modifications du cosϕ du réseau qui en découlent, il est en outre possible d’adapter la valeur de consigne du cosϕ par un procédé auto-adaptatif. De cette manière, on évite les écarts de réglage permanents de la tension et les courants réactifs de circulation élevés non autorisés.
Mesures de sécurité
Pour tous les procédés (sauf le procédé Δcosϕ), les régulateurs participant à la connexion parallèle échangent les données nécessaires via le réseau E-LAN. Si la connexion E-LAN est interrompue, il faut s’assurer qu’une régulation fiable continue d’être assurée. Comme le procédé Δcosϕ fonctionne sans connexion bus, il est utilisé comme programme de secours. Ce programme d’urgence est implémenté de manière standard dans le régulateur REG-D®. Son fonctionnement peut être décrit comme suit : Pendant le fonctionnement non perturbé avec les procédés ΔIsinϕ et ΔIsinϕ(S), le cosϕ du réseau est mesuré en permanence. Après une perturbation du bus, le dernier cosϕ mesuré est interprété comme cosϕ de consigne, et la procédure Δcosϕ est lancée.
Si le dysfonctionnement du bus est résolu, on revient au programme parallèle précédemment actif. Si la liaison bus est perturbée dans le cas du procédé maître-esclave et maître-suiveur, l’esclave se remet automatiquement en mode de régulation individuelle. Pour signaler cet état, un message d’erreur est émis.
Logiciel de simulation
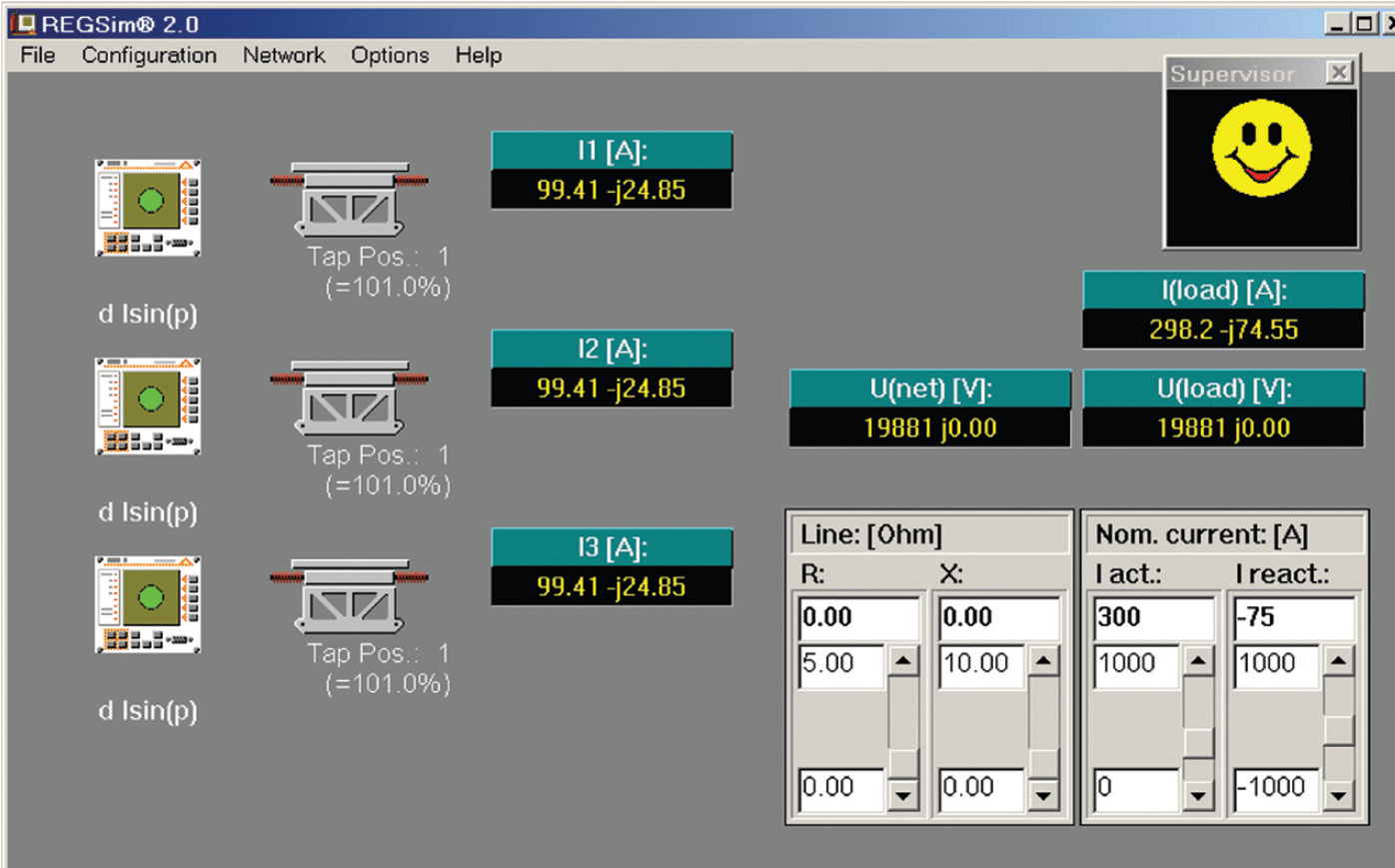
Il est possible d’estimer quel procédé de régulation parallèle convient à quelle installation sur la base de considérations théoriques (figure 8). Le logiciel REGSim (figure 9) offre la possibilité de simuler les procédés de régulation parallèle dans n’importe quelle configuration d’exploitation avec des transformateurs, le réseau et les charges. Les algorithmes de régulation implémentés dans le régulateur sont utilisés à cet effet. Différentes données de référence (tension nominale, impédance du transformateur, etc.) peuvent être paramétrées.
Il est ainsi possible de simuler le système de régulation de tension REGSys® dans une situation d’installation concrète. Sans intervenir dans l’installation, il est possible de déterminer comment le système de régulation se comporte dans des situations extrêmes (sauts de charge, défaut à la terre). La qualité de la régulation (constance de la tension, nombre de commutations) peut également être estimée à l’avance. Bien entendu, le programme est également adapté à des fins de formation.
Fonctionnement automatique en parallèle
Le ParaGramer (figure 10) sert d’outil pour la préparation automatique des connexions parallèles et pour la visualisation en ligne des états de commutation. Le ParaGramer représente les transformateurs impliqués dans la mise en parallèle, y compris les disjoncteurs, les sectionneurs, les couplages transversaux et longitudinaux, dans une représentation monophasée. Une représentation complète du jeu de barres doit être transmise à chaque régulateur par entrée binaire. Sur la base des états de commutation, le système reconnaît automatiquement quels transformateurs alimentent quel(s) autre(s) en parallèle sur une barre omnibus. Le système traite les barres omnibus reliées par des couplages transversaux comme une seule barre omnibus.
Dans la figure 10, par exemple, les transformateurs T1 et T3 fonctionnent sur la barre omnibus a, tandis que le transformateur T2 alimente la barre omnibus b. Avec l’aide du ParaGramer, il est également possible de réaliser des représentations de jeux de barres côté haute tension. Le ParaGramer est donc un outil approprié pour réaliser les montages parallèles les plus divers avec peu d’efforts et en toute sécurité.